Senkron Makinalar Nedir? Nasıl Çalışır?

Senkron Makineler; frekansı ve kutup sayısıyla, orantılı bir şekilde hareket ederek çalışıp, sabit hızda dönen, alternatif akım makinelerine denir.
Senkron Makinelerin Yapısı
Alternatör olarakta bilinen bu makineler temel olarak 2 ana bölümden oluşmaktadır. Bunlar Endüvi (Stator) ve Endüktör (Rotor)’dur.
Stator kısmı aynı Asenkron makinelerde olduğu gibi, alternatif gerilimin oluşturulduğu kısımdır. Silisli saçların yalıtılmasıyla oluşturulmuş yapılardır. Statorlar yapılarına göre hem duran hem de dönen olmak üzere de iki kısma ayrılabilir.
Dönen Tip Statorlar, duran stator türlerine göre büyük güçler için üretilmezler ve çalıştırılmazlar. Bu makinelerde akım ve gerilimler dış devre üzerine, bilezikler ve fırçalar yardımı ile alınmaktadır.
Senkron Makinelerdeki Rotorlar, asenkron makinelerdeki yapıya benzerdir. Bu Endüktör’ünde 2 çeşidi vardır. Bunlar;
- Yuvarlak Kutuplu Senkron Makineler
- Çıkık Kutuplu Senkron Makineler
Yuvarlak Kutuplu Senkron Makineler
Bu makineler genellikle yüksek devirli Generatörler de kullanılmak üzere üretilmiştir. Boyları uzun, çapları küçüktür.
Kutup sargıları ise rotor miline paralel olarak üretilmiş oluklara yerleştirilmiştir. Bunlarla beraber olan sargı uçları da rotor milinde bulunan bileziklere bağlanmaktadır.
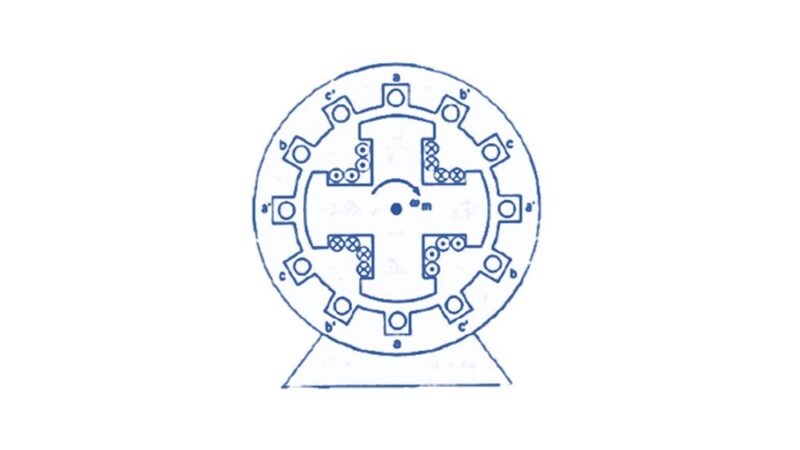
Çıkık Kutuplu Senkron Makineler
Çıkık kutuplu Senkron makinelerinde hava aralıkları, rotor çevresi boyunca sabit olmadığından stator sargısı, öz endüktans motorun dönme açısına bağlı olmaktadır. Bundan dolayı da her yerde aynı değildir. Bu makinelerin bu durumundan dolayı, çapları geniş, boyları da kısadır.
Çok gürültü yapan bu makinelerde, boşlukların dengesizliği nedeni ile rüzgar kayıpları meydana gelmektedir. Genellikle Hidroelektrik Santrallerinde Su Türbini olarak kullanılmaktadır.
Senkron Makineler – Çalışma İlkeleri ve Eşdeğer Devreleri
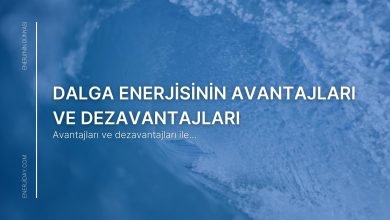
Senkron Makinelerin Çalışma Prensibi
Rotordaki sargılara doğru akım uyguladığımız zaman, statorda bir manyetik alan meydana getirebiliriz. Bu manyetik alan ile birlikte de rotor ve statorun dönme hızları eşitlenir.
Bunun sonucunda elde edeceğimiz kuvvet rotorun sürekli olarak senkron bir devir sayısında (ns) kalmasını sağlayacaktır. Döner Alan hızı = ns, rotor hızı = nr, ile gösterebiliriz. Bunlar ile birlikte sistemin kuvvet üretebilmesi için aşağıdaki denklem ile sağlamalıdır;
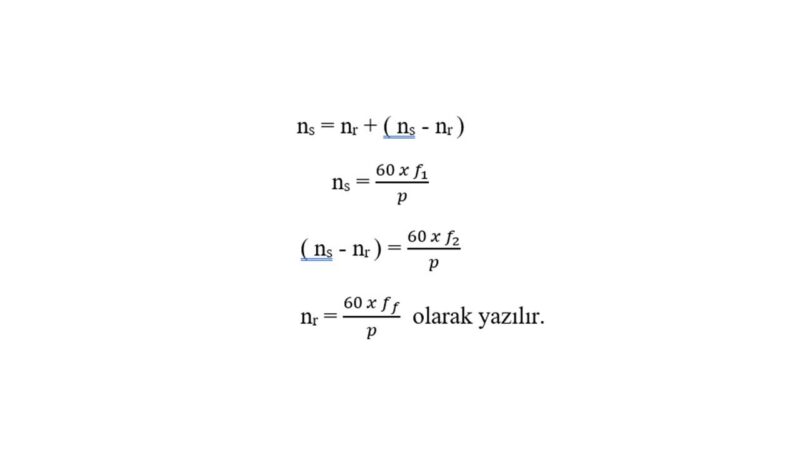
Yukarıdaki eşitlikler doğrultusunda;
f1 = fr + f2
bu ifadede f1 şebeke frekansıdır ve sabittir, değişmez. f2 rotor akımının frekansıdır ve rotorun akımı doğru akım olduğu içinde sıfırdır. Bu durumlar doğrultusunda ise;
f1 = f2
olur. Rotorun hızı da senkron hıza eşit olup bu denklem oluşur;
ns = nr
Rotor, döner alan hızında dönecektir. Bu iki hız da sürekli eşit olduğu için bu makinelere senkron makineler denir.
Senkron Makineler – Eşdeğer Devreleri;
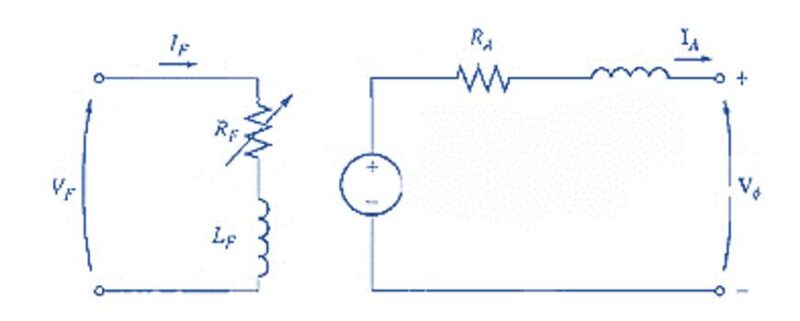
Bir fazlı Senkron Makinelerin Eşdeğer Devresi aşağıdaki gibidir;
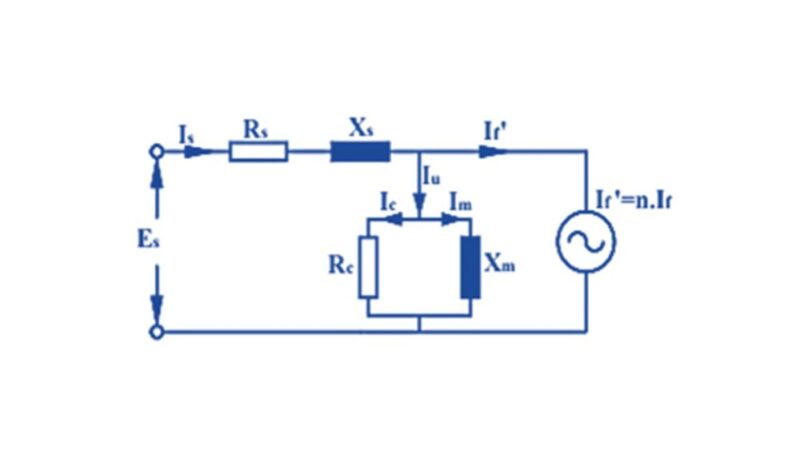
Bu Devrede Verilenler ve Formülleri;
- Rf ; Rotor Direnci
- Xlf’ ; Rotor Kaçak Raktanısı
- Ef ; Rotor Sargılarında Endüklene Gerilimin Stator Sargılarına Aktarılmış Hali.
- Es ; Stator Sargılarında Endüklene Gerilim

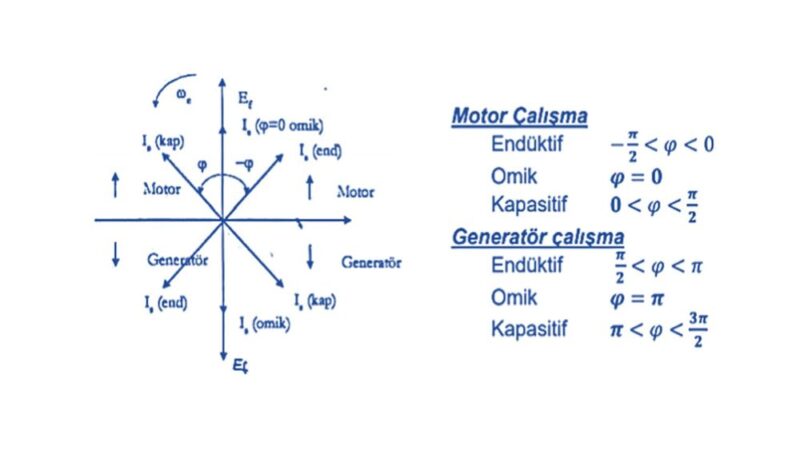
Senkron Makineler – Fazör Diyagramları
Bir fazlı eşdeğer devreler sayesinde fazör diyagramların oluşturulur. Faz diyagramları için makinelerin Endüktif, Omik ve Kapasitif yük durumlarına göre değişik şekillerde yararlanılır. Motor ve Generatörlerin Faz diyagramları için aşağıdaki koşullar gereklidir.
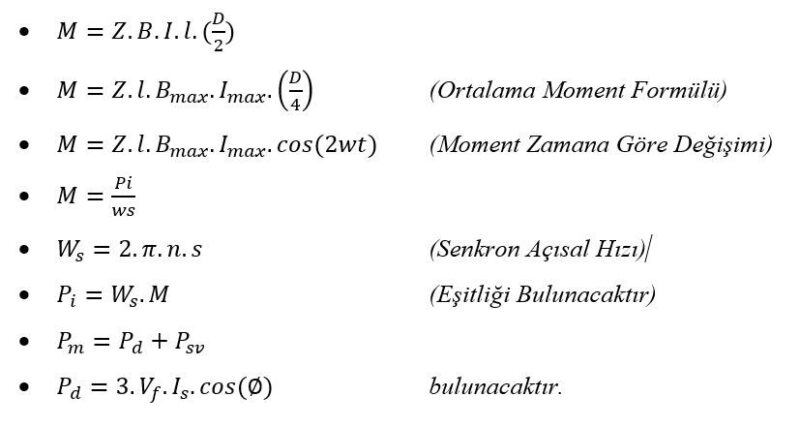
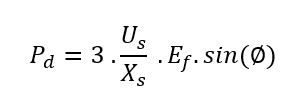
Senkron Makineler de Güç ve Moment
Senkron Makineler de moment üretilebilmesi için sargılara ve bu sargılardan akan akımlara ihtiyaç vardır. Bununla birlikte Z adet iletkene etki eden kuvveti bulabilmek için aşağıdaki eşitlikler kullanılır;
Senkron Generatörler
Senkron makinelerinin rotor sargıları, mekanik etki ile döndürüldüğünde, stator sargılarında da Ef gerilimi endüklenecektir. Bununla birlikte aşağıdaki formül oluşacaktır;
(Bu formülde; K: Hareket Gerilim Katsayısı, If : Uyarma Sargısı Akımı, ns: Stator Döner Alan Hızıdır.)
Eğer Generatör boşta çalışıyorsa Ef = Us olacaktır. Fakat senkron makine, yükü bekliyor ve çalışma devam ediyor ise, sargılardan da akım akacağı için, endüklenen gerilim ile çıkış gerilimi arasında haliyle farklılıklar olacaktır. Oluşan bu Farklarda, bize Generatörün Eşdeğer Devresini oluşturmamıza yardımcı olacaktır.
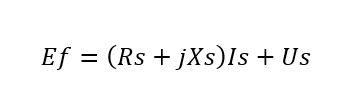
Bu eşdeğer devreyi göz önüne alarak, Ef değerini bulmak için aşağıdaki formül kullanılabilir;
Senkron Generatörlerin Karakteristikleri
Senkron Generatörlerinin karakteristiklerini kullanmamızdaki amaç, devredeki ve sistemde bulunan uyarma akımı ve akım arasındaki ilişkiyi ve ayriyeten senkron reaktans ve stator sargı direnci hakkındaki çıkarımları yapabilmek için kullanmaktayız. Aşağıdaki grafik Senkron Generatörlerin Boşta Çalışma ve Kısa Devre Karakteristiklerini anlatmaktadır.
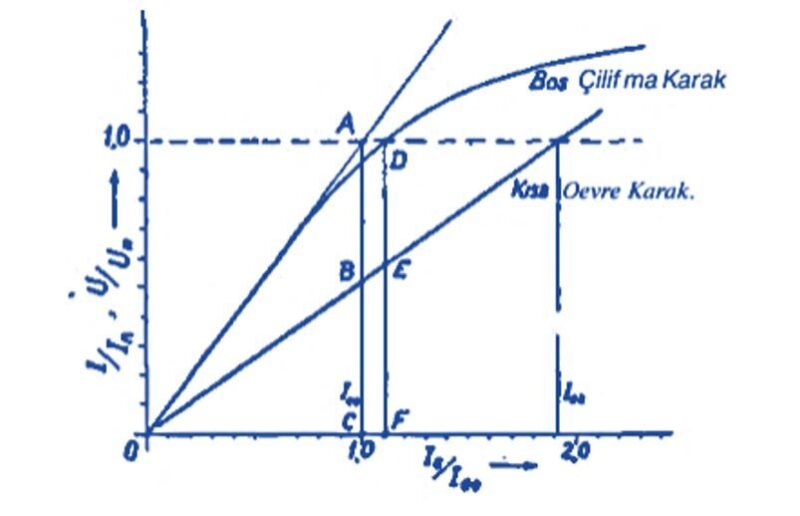
Kısa Devre Çalışma: Makinenin uyarma akımı 0’a ayarlanarak, generatörün uçları ampermetre cihazı üzerinden kısa devre edilir. Daha sonra Uyarma akımı arttırılarak, Is ölçülür. Ölçülen değerlerden de If’ye göre Is çizilir ve kısa devre karakteristiği elde edilir.
Boşta Çalışma: Senkron Generatörün rotor kısmı anma hızında döndürülürken, generatörün uç bağlantıları yükten ayrılır. Bu sayede Uyarma akımı değeri, başta 0 iken, senkron hıza ulaşıncaya kadar geçen sürede artış gösterir.
Uç gerilimlerinin ölümü sırasında, uçların açık olduğu zaman Is = 0 ve Ef = Us olmaktadır. Daha sonra generatör boşta çalışmaya başladıktan sonra uç gerilimleri bir daha ölçülür. Bu değişimler de generatörün boşta çalışma karakteristiğini oluşturmaktadır.
Paralel Bağlanmaları
Senkron Generatörlerin şebekeye bağlarken paralel bağlanması gerekmektedir. Fakat bu durum ansızın istenildiği gibi yapılamamaktadır. Bunun için gerekli bazı şartlar vardır. Bunlar;
- Makinelerin uç gerilimleri ile şebeke gerilimlerinin genlikleri eşit olmalı,
- Generatör ile şebeke frekansları eşit olmalı,
- Generatör ile şebeke gerilimleri aynı fazda olmalı,
- Generatör ile şebeke faz sırası ile aynı olmalıdır.
Aktif Yük ve Reaktif Yük Ayarı
Sistemdeki Uyarma akımı (If), uç gerilimimiz sabit ve frekansın değişmediği durumda, eğer generatöre binen aktif yük artarsa, generatör yükü belli bir değer kadar karşılayacaktır. Buradaki Aktif güç, mile verilen gücün değişmesi ile ayarlanabilir.
Reaktif yük ayarında ise Sabit frekans ve gerilim değerleri ile, şebekeye bağlı senkron generatörler de aktif güç sabit tutulup, reaktif güç ayarı yapılabilmektedir.
Hız ve Voltaj Regülasyonu
Senkron generatörün uyarma akımının sabit kalması durumunda, stator akımı ile sabit kalması istendiği durumda, uyarma akımını ayarlamak gerekebilmektedir.
Gerilim regülatörlerinde ise genellikle generatörün değişken uç gerilimi ölçülmektedir. Bu gerilimin durumu ölçülüp daha sonra referans bir gerilim ile karşılaştırılır.
Fark gerilim, bir amplifikatör yardımı ile büyütülür. Daha sonra fark gerilimine bağlı olarakta, uyarma akımının üç gerilimi istenen değerlere kadar getirmesi için çalışma yapılmaktadır.
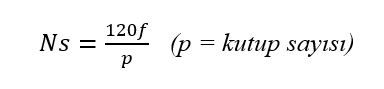
Ayrıca Statordaki kutuplarında dönüş hızına senkron hız denir. Motorlardaki kutupların sayısının artması ile de senkron hız düşmektedir. Aşağıdaki formülle bunun ne görebilmekteyiz.
Dinamik Kondansatör Regülasyonu
Senkron Makinelerde If, küçük If0 (Uyartım akımının küçük olduğu) generatörün çalışma durumudur. Ve bu durumda akımı değiştirerek dinamik kondansatör etkisini de görebilirsiniz.
Senkron Motorlar
Senkron Makinelerin, yükü değişse de senkron devirde devridaim yapan ve devir sayısı aynı kalan makinelere Senkron Motor denir.
Bu durumun gerçekleşmesi, yani motor olarak çalışabilmesi için yük momentinin motor momentinden daha büyük olması gereklidir. Devir sayısı da, frekans ve kutup sayıları ile değiştirilebilir.
Senkron motorlar kendi kendilerine yol alamazlar. Bu nedenle onlara yol vermek için çeşitli yol verme yöntemleri bulunmaktadır. Bunlar;
Asenkron Motorlarla Yol Verme; Asenkron motorların söndürümlü sargılarının özellikleri sayesinde, uçları kısa devre edilmiştir.
Rotorun kutup kısmına sincap kafes yerleştirilerek stator sargılarından gerilim uygulandığında asenkron motora benzer şekilde dönmeye başlayacaktır.
Yardımcı Motor ile Yol Verme; Bu motorların senkron hıza ulaşabilmesi için, sistem için yardımcı motorlar kullanılır, daha sonra tek başına hareket eder.
Frekans Değiştirerek Yol Verme; Bu yöntem Endüvi sargılarının frekansı değiştirilerek yapılır. Generatörün frekansı yavaş yavaş arttırıldığında, devresine bağlı senkron motorun döner alan hızı da sıfırdan başlayarak artar ve makine senkron hıza çıkarılır.
Yenilenebilir Enerji Kaynakları ve Enerji Sistemleri hakkında daha fazla içerik için bloğumuzu takip edebilirsiniz.