Asenkron Makineler Nedir? Nasıl Çalışır?

Asenkron makineler (3 Fazlı İndüksiyon Motorları) başlangıç durumu ve bitiş süreleri ve durumları aynı olmadığı için, kısacası Senkron bir yapıda olmadıkları için Asenkron adını almaktadırlar.
Ayrıca çalışma prensipleri gereği ayrıca bu makinelere indüksiyon yani manyetik alan farkı oluşturucu da denmektedir.
Asenkron Makine Nedir?
Asenkron makineler, rotor için gerekli olan gücü, indüksiyon yolu ile aktaran alternatif akım motor tipidir. Ayrıca Senkron Makinelerden ayrılan en önemli özelliği dönme hızının sabit olmayışıdır.
Asenkron Makinelerin Yapısı
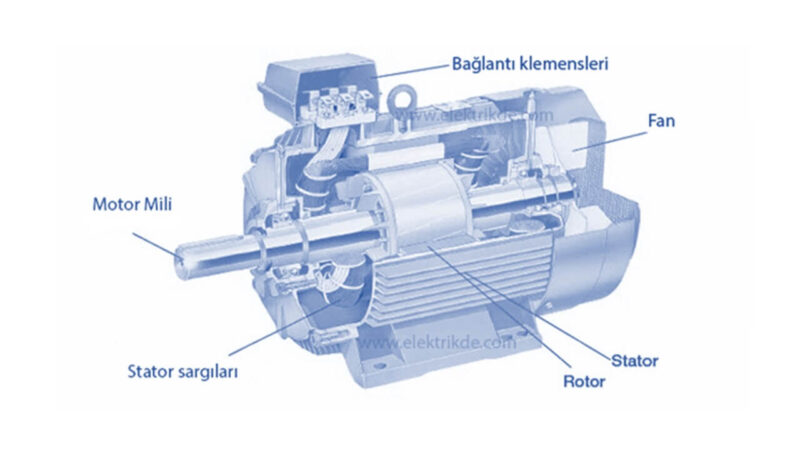
Motor olarak çalışıp elektrik enerjisini mekanik enerjiye çeviren, Generatör olarak çalışıp mekanik enerjiyi elektrik enerjisine çeviren bu makineler temel olarak iki ana parçadan oluşur. Bunlar; hareketsiz parçası olan Stator ve hareketli parçası olan Rotor’dur.
Stator
Asenkron makineler de, hareketsiz olan bölüme Stator denir. Stator, makinenin çalışması için gerekli olan manyetik alanın oluşmasını sağlar.
Stator ince silisyum sacların üst üste yerleştirilerek elde edilirken, bu saclar sayesinde de manyetik alanın oluşacağı devre kendini tamamlar.
Stator oluşacak olan manyetik alanın büyüklüğü, oluklarında sarılmış sarım sayısının (ampersarım) yüksek olmasına bağlı bir durumdur.
Sargılardan geçecek akım ile oluşacak manyetik akının etkisiyle rotorda dönmeye başlayacak.
Rotor
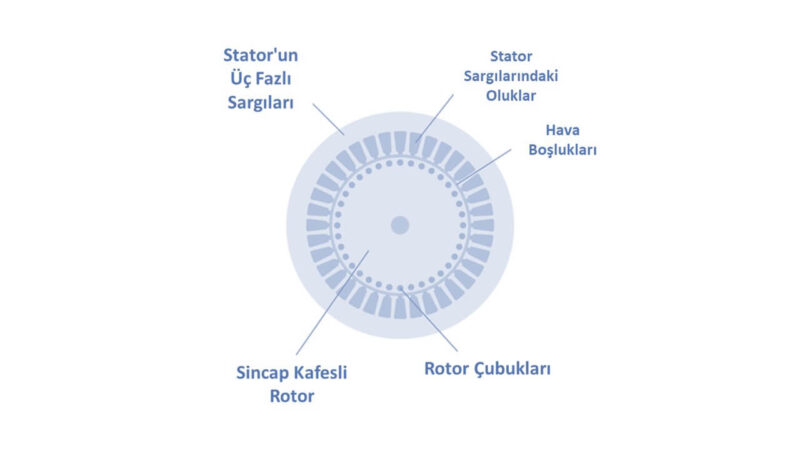
Rotor, asenkron makinelerin dönen yani hareketli bölümleridir. Rotorlar, Sincap Kafesli ve Bilezikli olmak üzere ikiye ayrılır.
- Sincap Kafesli Asenkron Motorlar sargıların yerine, iletkenler kullanılır. Bu iletkenler ile birlikte her iki ucu kısa devre olur ve bu sayede çalışabilirler. Küçük güçler için üretilirler, bundan dolayı maliyetleri ucuz, yapımı kolay ve güçleri de Bilezikli Rotorlara göre düşüktür.
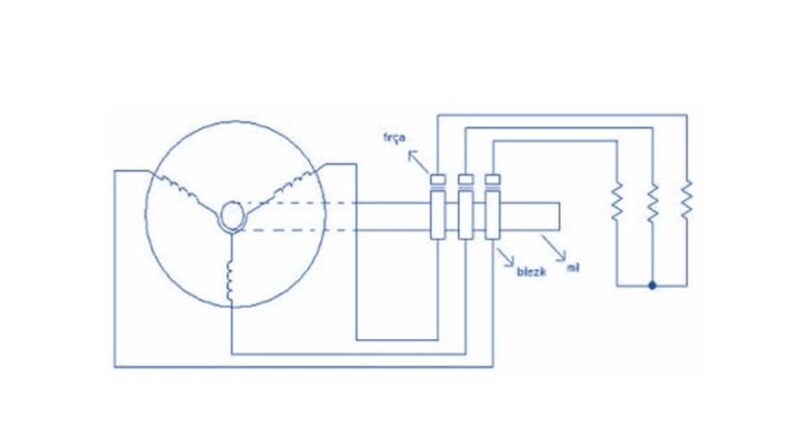
- Bilezikli Asenkron Makinelerinde ise milin bir ucuna bağlı bilezikler üzerinden kısa devre olurken diğer ucu kendi aralarında yıldız veya üçgen bağlantı ile kısa devrelenir. Bu makineler, sincap kafeslilere göre daha güçlü ve yapımı daha zor olan maliyetli aletlerdir.
Asenkron Makinelerin Çalışma İlkeleri
Konuya şu şekilde bir örnekle girmek doğru olacaktır. DC motorların dönmesi için çift uyarma yapmamı gerekir. DC Motorlardaki fırça düzenlemesi yolu sayesinde biriyle statoru, diğeriyle ise rotoru besleriz.
Statorun sargıları 120o açı ile birbirlerinden eşit olarak yer değiştirirler. Uyarma dediğimiz şey ise motorun parçaları üzerindeki manyetik indükleme işlemi anlamına gelir.
Ancak Asenkron Motorları DC motor gibi çift uyarma ile değil de, tek uyarım ile beslemekteyiz. Bu uyarımı da motordaki Stator sargılarına vermekteyiz.
Stator sargılarına güç verdiğimizde, bobindeki akım akışı nedeni ile Statorda bir manyetik akı oluşur. Buda 3 Fazlı beslemelerde Manyetik alan oluşmasına sebep olur.
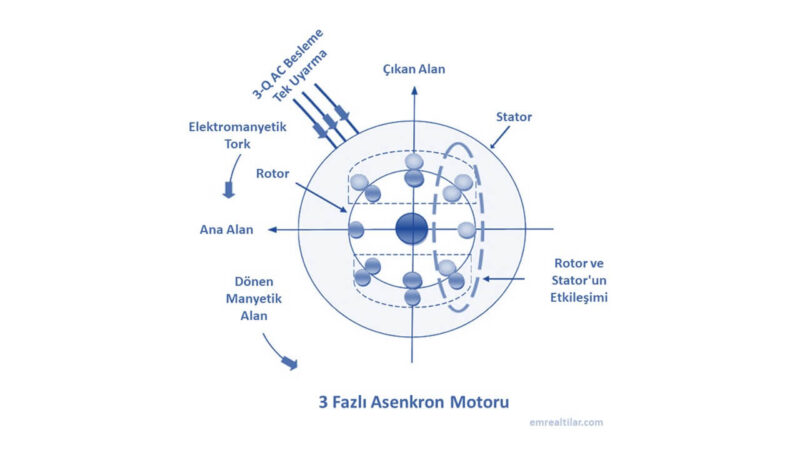
Dönen manyetik alanın yukarıdaki resme de bakarak, saatin tersine indüklendiğini görebilirsiniz. Dönen bu manyetik alan da hareketli kutuplara sahiptir.
Manyetik alanın polariteleri, makinelerin ihtiyacına göre pozitif ve negatif yarım döngülere göre değişiklik gösterir. Bu durumda kutuplardaki değişiklik oluşan bu manyetik alanı döndürür.
Rotorda bulunan iletkenler sabittir. Bu sabit iletkenler, statorun dönen manyetik alanını keser ve elektromanyetik indüksiyon nedeniyle oluşan bu güç rotorda indüklenir. Rotorun iletkenleri, uç halkalar veya harici olan dirençlerin yardımıyla kısa devre yapar.
manyetik alan ile rotor iletkenleri arasında küçük bir hareketlenme ile rotor iletkenleri akımı üstlerine alır. (Bu kısa devre olayına fizikte Faraday’ın Elektromanyetik İndüksiyon Yasası denir.) Rotor bobinlerinden geçen akım, rotorda başka bir akı oluşturur.
Bu durum sonucunda hem Statorda hem de Rotor da toplamda iki akı meydana gelmiş oldu. Bu akı’lar birbirleri ile etkileşeceklerdir. Ancak iletkenlerin ucunda iki akıdan birinin yoğunluğu yüksek olduğu için diğerini durdurup itmeye başlayacaktır. Bu da rotorun üzerinde yüksek yoğunluklu akının meydana getirdiği bir elektromanyetik tork oluşturacaktır.
Elektromanyetik tork ve dönen alanın yönü aynıdır. Bu nedenle rotorda dönen alanla aynı yönde dönmeye başlar.
Unutmadan, rotorun hızı her zaman dönen manyetik alandan veya senkron hızdan daha düşüktür. Stator alanının senkron hızını yakalamaya çalışır ve böylece döner.
Ancak pratikte rotor asla yetişmeyi başaramaz. Zaten eğer aynı hızı yakalarsa aralarındaki hız farkı olmayacak, dolayısıyla da indüklenmiş rotor akımı ve dönüşü korumak için tork üretimi olmamış olacaktır.
Bu durum, motoru durdurmaz, tork kaybı nedeniyle rotor yavaşlar, hız nedeniyle tork tekrar uygulanır. Bu nedenle rotor, her zaman senkron hızından daha düşük olan bir hızda döner.
Asenkron Makinelerde Döner Alan ve Moment
3 Fazlı Asenkron Makineler, stator sargıları gerilim ile beslendiği zaman bu makinelerde Döner Manyetik Alan oluşur. Senkron hızda dönen manyetik alan ile birlikte, durmakta olan rotorun iletkenlerinde gerilim indüklenmeye başlar.
Bu indüklenme ile birlikte kısa devre oluşur ve daha sonrasında rotor üzerinde akım akmaya başlayacaktır. Rotor üzerinden akan akım ile birlikte Biot-Savart yasası gereği iletkenlere etkiyen bir kuvvet meydana gelir ve rotor da dönmeye başlar.
Bu işlemler ardı ardına yapıldığı ve arada kuvvetlerde kayıplar olduğu için rotor hızı senkron hızdan küçük olacak ve hiçbir zaman o hıza ulaşamayacaktır.
“Bu formülde “f” Frekans, “p” ise Kutup Çifti Sayısıdır.
Üç Fazlı Asenkron Makinelerin Döner alanı yukarıda da değindiğimiz gibi döner alan meydana gelir.
Tek Fazlı makinelerde döner alan oluşmaz. Bu makinelerde hem sargıların hem de akımların tek fazlı olması gereği ile ancak alternatif manyetik alan oluşur. Döner manyetik alan olmadığı içinde rotor dönemeyecek.
İşte bu durumun önüne geçebilmek içinde yardımcı ekipmanlar gerekecektir. Yardımcı ekipman olarak ya yardımcı sargı ya da kondansatör kullanarak döner manyetik alan oluşturulur ve bu sayede de makine döner.
Asenkron Makineler, birden fazla Eşdeğer devresi üzerine moment karakteristiğine sahiptir. Bu değişken karakteristikler, farklı asenkron makinelerinin çalışma durumlarına göre şekillenmişlerdir. Biz bu yazımızda L tipi Eşdeğer Devreye göre oluşan momenti değerlendireceğiz.
Öncelikle aşağıdaki “Eşdeğer Devresi” konu başlığındaki L Tipi Eşdeğer devresine ait moment formülü aşağıdaki gibidir;
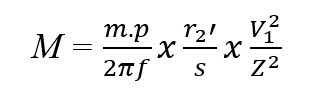
Bu formülde “m” faz sayısını, “p” kutup çifti sayısını, “f” frekansını, “V1” statora uygulanan gerilimi, “Z” ise Eşdeğer devrenin Empedansını göstermektedir.
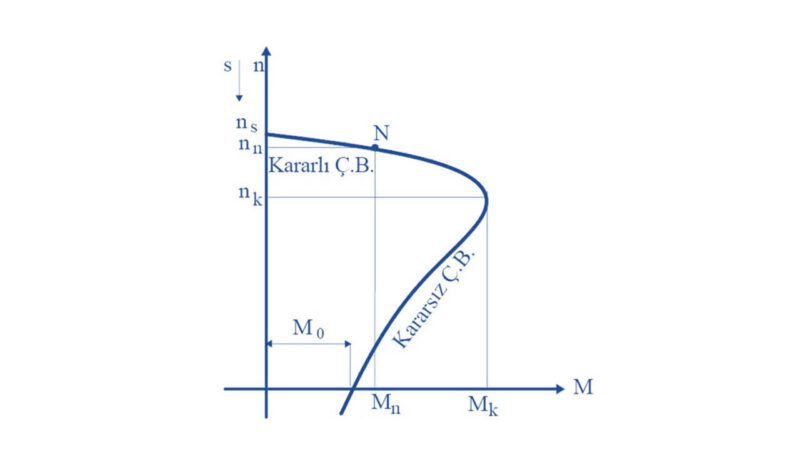
Yukarıda görmüş olduğunuz Asenkron Motor Hız – Moment Karakteristiğini yorumlayacak olursak, makinenin (gerçekte mümkün olmayan) senkron hızdayken, rotorun hızının sıfır olduğunu bizlere göstermekte.
Fakat makinenin kalkınması için belli bir kalkış momentine (M0) ihtiyacı vardır. İşte makinenin bu durumda rotorun hız kazanması için öncelikle kendini harekete geçirip, rahatlaması gerekir.
Makinenin kalkındıktan sonra belli bir hız değerinden sonra da veriminin düştüğü görülmektedir. Yani devrilme momenti dediğimiz motorun en son verimli çalışmasından önceki son noktayı (Mk) aşmıştır. Makinelerin bu noktayı geçmemesi gerekmektedir.
Asenkron Makinelerin bu durumdaki hızlarına devrilme hızı (nk), kaymasına ise devrilme kayması (sk) denilmektedir. Bu parametrelerden oluşan moment formülüne de devrilme momenti denilmektedir.
Asenkron Makineler – Matematiksel Modeli ve Eşdeğer Devresi
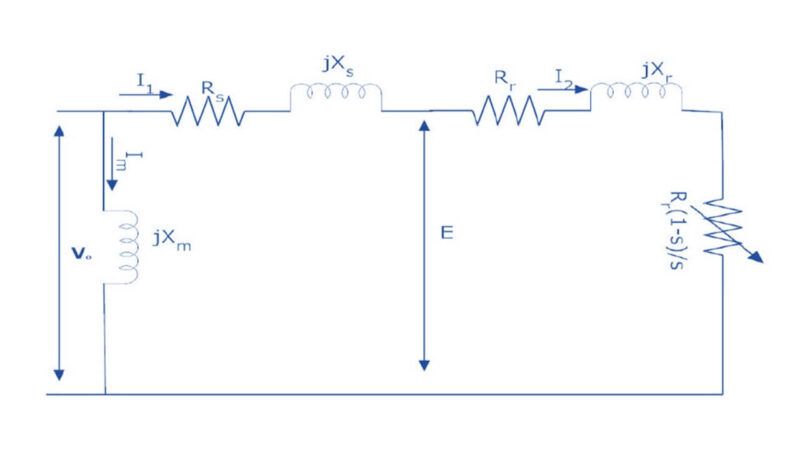
Aşağıdaki bulunan devrede asenkron makinelerin L tipi eşdeğer devresini görebilirsiniz. Transformatörlerde ki primer sargıyı statorun temsil ettiği gibi sekonder tarafı da rotor temsil etmekte.
Buradaki önemli nokta şu şekildedir. Kayma faktörü dediğimiz faktör, devrede bulunan akım ve gerilime önemli derece de etki etmektedir.
Normal şartlarda aşağıdaki şekilde gördüğünüz makinenin çıkışında bulunan direnç hayali bir dirençtir. Çünkü kaymaya göre, rotor tarafında olan direnç değerleri değişiklik gösterebilmektedir.
Peki yukarıda Eşdeğer devrede bahsettiğimiz bu Kayma Faktörü nedir? Asenkron Motorların, döner manyetik alanın oluşturduğu senkron hızda, hiçbir zaman dönemeyeceğini söylemiştik. Zaten dönse de rotor dönemeyecektir, ki zaten dönme durumu da imkânsız.
İşte bu imkânsız olan duruma sebep olan bir olay bulunmakta. Biz aralarında olan bu olaya, aralarındaki bu farka “Kayma” demekteyiz. Kayma’yı “s” ile gösteriyor ve aşağıdaki formül ile gösteriyoruz;
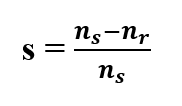
- S = 1 durumu; Kayma faktöründe, rotor hızı (nr) sıfıra eşit olursa eğer, kayma 1’e eşit olacaktır. Bu durumun anlamı şudur. Bildiğiniz gibi bu makinelerde rotor henüz dönmeden önce, statora bir gerilim uygulanır. Bu gerilimin oluşturduğu manyetik alan sayesinde de, rotorda bir gerilim indüklenir. Sonrasında da rotor dönmeye başlar. Buda aynı transformatörlerin çalışma mantığıdır.
- S < 0 durumu; Eğer kayma,, sıfırdan küçük olursa nr dediğimiz rotor hızı, ns dediğimiz stator hızından büyük anlamına gelmektedir. Normal çalışmada da makine kendiliğinden senkron hızı geçemeyeceğinden dolayı, motora dışarıdan bir tahrik makinesi ile döndürülüyor demektir. Buda makinenin Generatör modunda çalıştığını gösterir.
- S = 0 durumu; Kaymanın sıfıra eşit olması demek, rotor hızının senkron hıza eşit olması demektir. Ancak bu durumun mümkün olmayacağını söylemiştik. Teoride bu durum geçerli olsa da makinede statora gerilim uygulanır ancak rotordan akım geçmez. Yani rotorun iletken uçları açık devre gibi davranarak, makinenin boşta çalışmasını göstermektedir.
- S > 1 durumu; Kaymanın 1’den büyük olması demek, senkron hızın ters yönde döndüğü anlamına gelmektedir, yani rotor ile senkron hız aynı yönde dönmektedir. Bu durum iki taraf içinde ters olduğundan makine fren modunda çalışacaktır. Fakat asenkron motoru frenlemek için farklı yöntemler bulunmaktadır. Sistemde bulunan R, S, T fazlarından ikisinin yerleri değiştirilerek döner alanın yönü değiştirildiği gibi, stator sargılarına DC gerilim uygulayarak, stator faz sargılarını asimetrik bağlayarak frenleme yapılabilir.
Yani Asenkron makinelerin, motor olarak çalışabilmesi için s kayma faktörünün 0 ile 1 arasında olması gerekir. Yani nr rotor hızının, senkron hızından küçük olmalıdır.
Asenkron Makinelerde Yol Verme Yöntemleri
Asenkron motorlar, kalkış anında şebekeden nominal alması gereken akımlardan 3-6 kat arasında daha fazla akım çekebilmektedir. Bu durumda yüksek güçlü motorlardaki kumanda elemanlarının gereksiz yüksek seçilmesine, kısa sürede arıza yapmalarına sebebiyet verebilmektedir.
Aynı zamanda, büyük güçlü motorlarda da direk yol vermeye çalışıldığı an, şebeke istenmeyen gerilim düşümlerine meydana gelmektedir. Bu sebeplerin önüne geçebilmek içinde asenkron motorlarda yol verme yöntemleri kullanılmaktadır.
Asenkron Motorların Yol Verme Yöntemleri;
- Doğrudan Yol Verme Yöntemi,
- Yıldız – Üçgen Yol Verme Yöntemi,
- Oto Trafosu ile Yol Verme Yöntemi,
- Dirençle Yol Verme Yöntemi,
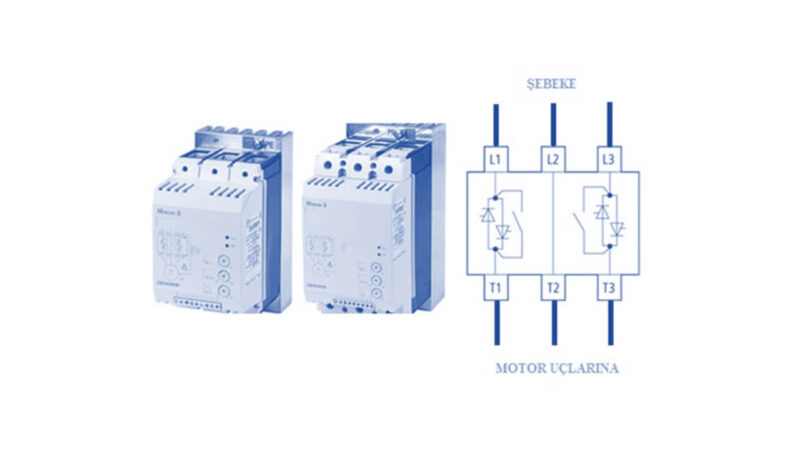
- Yumuşak Yol Verme Yöntemi (Softstarter),
- Sürücü ile Yol Verme Yöntemi,
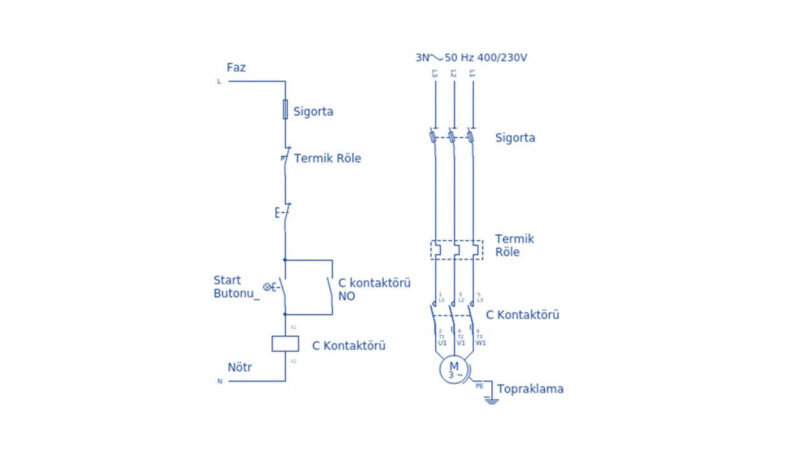
Doğrudan Yol Verme, diğer adıyla direk yol verme asenkron motorun, paket şalter, termik şalter veya kontaktör gibi ara elemanlar ile doğrudan şebekeye bağlantısının yapıldığı bağlantı türüdür. Bu yöntem genellikle gücü 4kW’a kadar olan, küçük güçlü motorlar için tercih edilmektedir.
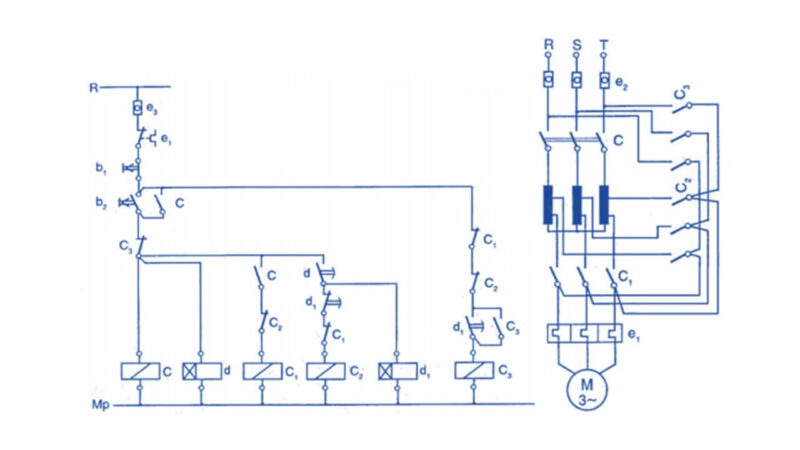
Yıldız – Üçgen Verme, muhtemelen piyasada en çok kullanılan yol verme yöntemidir. En çok kullanılmasının sebeplerinden biri, diğer yol verme yöntemlerine göre daha ekonomik ve uygun olmasıdır.
Ancak bu yöntemin uygulanabilmesi için, ona uygulanacak motorun da bu yol verme yöntemi için uygun olması gerekmektedir. Çünkü her üç fazlı motora yıldız-üçgen yol verme yöntemi uygulanamaz.
Bu yöntemin kullanılmasının asıl sebebi, motorun ilk kalkınma anındaki çekilebilecek olan akımın motora zarar vermesini önlemek. Onun için motoru ilk yıldız bağlantısı ise çalıştırmak ve ardından da motoru normal bağlantısı ile yani üçgen bağlantıya dönüştürerek çalışmasına devam etmesini sağlamaktır.
Bu sayede, çalışacak olan motor yıldız bağlantısını kullanarak normalde şebekeden çekilecek olan akımı 1/3 oranında azalmasını sağlamıştır. (Yıldız-Üçgen formülü)
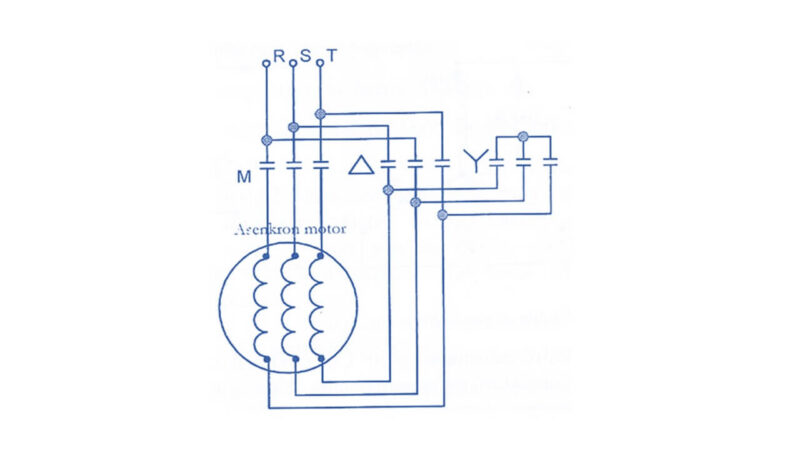
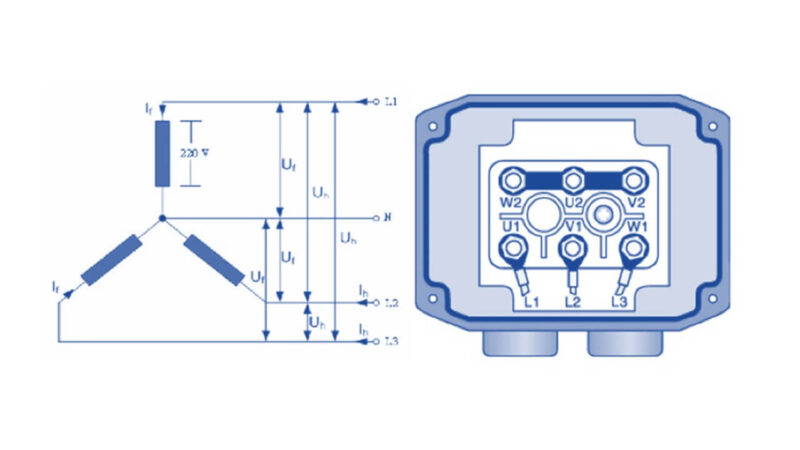
Yıldız bağlantıda Z, X ve Y uçları köprülenir. U, V ve W uçları ise şebekeye bağlanır. (Şekil.9)
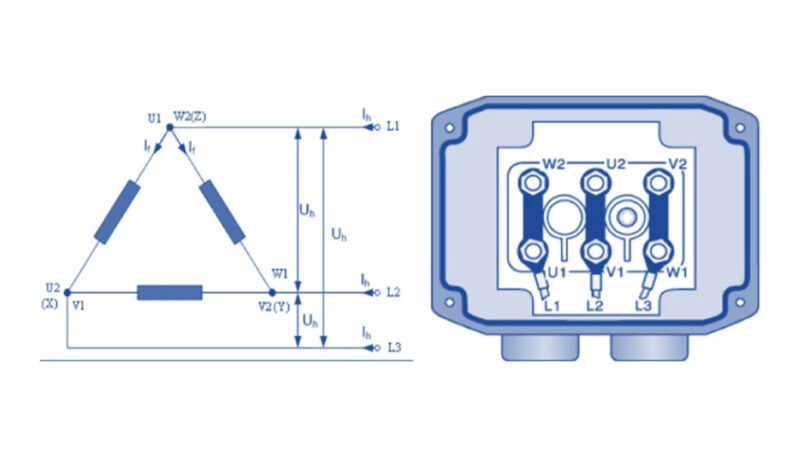
Üçgen bağlantıda ise Z, X, Y ile U, V, W uçlarının birleştirilmesi ile yapılır. (Şekil.10)
Oto Trafoyla Verme yöntemi, bağlanacak motorun; üçgen çalışma gerilimi, şebeke gerilimine uygun olmaması ve haliyle yıldız-üçgen yol verme yönteminin uygun olmaması durumlarında kullanılır.
Oto trafolar, gerilim ayarlamaları yapılabilen bir transformatör çeşididir. Şebeke gerilimi oto trafosunun primerine uygulanır. Kademeli olarak sarılan oto trafosu sekonder uçlarından motora uygulanmaktadır.
Bu şekilde çalışarak kalkınma akımı, normalden %65 civarında şebekeden daha düşük çekilerek, oluşabilecek arızaların önüne geçilmiş olur. Hatta bu rakam, yıldız-üçgen’de %35 civarındadır.
Bilindiği gibide, yıldız-üçgen yol verme metodunda yaklaşık 10 sn. gibi bir süre sonra, üçgen bağlantıdan zaman rölesi yardımıyla yıldız bağlantıya geçmektedir. Oysa ki oto trafosuyla yol verme metodunda aynı olarak zaman rölesi ile birlikte kumanda edilmektedir.
Oto trafoları günümüzde hala pahalı olması nedeniyle maalesef pek ekonomik değillerdir. Ama büyük güçlü, yük altında çalışan motorlara da iki kademeli oto trafolarıyla yol verilebilir.
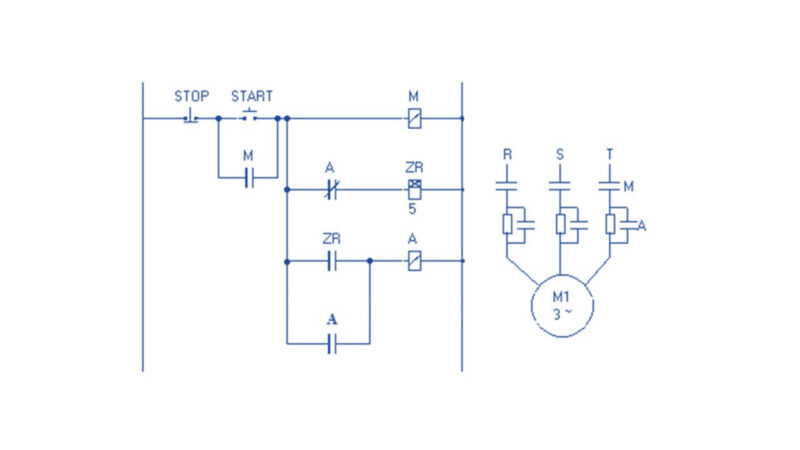
Direnç ile Yol Verme Yöntemi yaparken temel amaç, şebeke gerilimini düşürmektir. Burada kullanılan direncin görevi, normal kullanılan direncin görevi ile aynıdır.
Bu direnç sayesinde motorun şebekeden çekeceği kalkınma akımı, gereğinden düşük olacaktır. Dirençlerin seri bağlandığı bu metot da, diğer metotlar gibi zaman rölesi de kullanılmaktadır.
Yumuşak Yol Vericiler (Softstarter), gelişen teknoloji ile üretilmiş, mikroişlemci tabanlı sistemlerdir. Bu vericiler, motora uygulanan akım ve gerilimi izleyerek sistemin nasıl ilerlediğini incelerler.
Bunların en büyük özellikleri motorları şebekeye minimum darbe ile yani yüksek akım ve yüksek gerilimin olmaması için çalışmalarıdır. Sistemi inceleyerek en uygun akım ve gerilim anında motorun kontrollerini yaparlar, sisteme alırlar. Bu özelliklerinden dolayı da onlara yumuşak denmektedir.
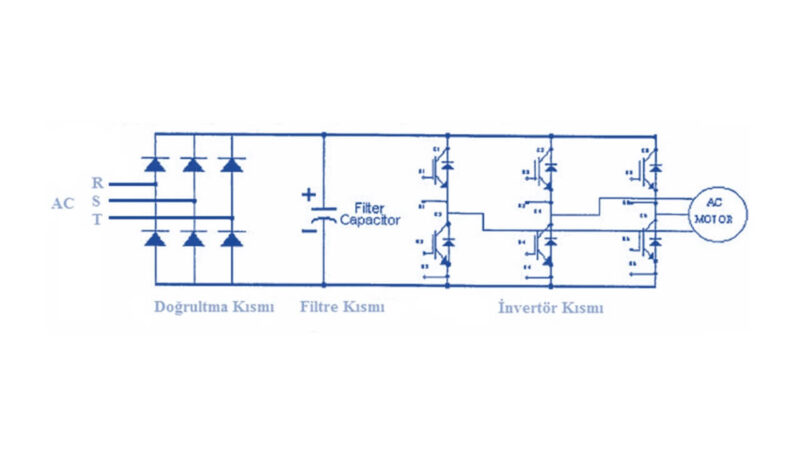
Sürücü ile Yol Verme yönteminde, frekans değiştirilerek, hız ayarları invertör cihazı ile yapılmaktadır. Asenkron motorların kutup sayısı ve frekansı değiştiğinde hızı da değişir (n=60.f/s).
Bu mikro işlemci elektronik elemanlar ile asenkron motorların statoruna uygulanan gerilim ve frekans oranı, motorun çalışma şartlarına bağlı olarak değiştirilir, bu sayede istenen devirde istenilen moment kuvveti elde edilir.
Asenkron Makinelerde Hız Kontrol Yöntemleri
Asenkron motorlar, piyasada çok yaygın olarak kullanılmaktadır. Haliyle bu motorların kullanımı konusunda da farklı hız kontrol yöntemleri bulunmaktadır. Bu yöntemleri kısaca başlıkları hakkında bilgi vermek gerekirse bunlar;
- Statora verilen gerilimi değiştirmek,
- Uygulanan Frekansı değiştirmek,
- Statordaki Kutup sayısını değiştirmek,
- Rotoru direnç ile kontrol etme,
- Rotor devresine EMF enjekte edilerek…
Yukarıda yazılı olan hız kontrol yöntemleri kullanılabilir.
Üç Fazlı Asenkron Generatörler
Asenkron Makineler, generatör olarakta kullanılırlar. Fakat generatör olarak kullanılması, kayma değerlerine bağlıdır. Asenkron Makinelerin, Eşdeğer devresi, parçalar ve diğer kısımları aynı, ancak akım yönü farklıdır. Yani asenkron makineler/motorlar şebekeden akım çekerken, Generatörler ise şebekeye akım verir.
Asenkron Generatörler aktif güç verirken, reaktif güce ihtiyaç duyarlar. Bunu şebekeden çekipte dalgalanmaların ve sıkıntıların oluşmasını önlemek için yanlarına kurulacak olan kondansatörler üzerinden de ihtiyaçlarını giderebilirler.
Kondansatörlerin onlara yakın olması, güç üçgenindeki Cos(Q) açısındaki değişimin çok olmamasını sağlayacaktır. Bu da sistem için faydalı bir durumdur.
Asenkron Makineler hakkındaki yazımızın sonuna geldik. Bu konunu devamı niteliğinde olan Senkron Makineler yazımız çok yakında sizler ile olacaktır.